Mei Yunhua, Southwest Institute of Electronics Technology
Keywords: IMA; embedded computer; PowerPC; operating system
0 Preface
In Integrity Module Avionics (IMA) devices, the embedded computer realizes complex application functions, multiple tasks, and tight functional coupling. In order to meet the performance and reliability requirements of IMA avionics, it is necessary to improve the performance of IMA avionics equipment based on the traditional embedded computer, enhance the design, and develop a corresponding embedded computer platform.
This paper analyzes the “Integrated Modular Avionics Design Manual†(also known as ARINC651 report), sums up the design requirements for embedded computers in IMA avionics equipment, and proposes an embedded computer platform design and design scheme that can meet the design requirements. .
1 design requirements
The ARINC 651 report describes the composition, functions, and working methods of IMA avionics in the framework of the five IMA avionics systems. The embedded computer requirements for each device are not exactly the same.
In type A avionics, the embedded computing module is required to be able to independently implement an aeronautical function. It has data plane data collection, distribution, and control logic implementation of the processing plane, resources and capabilities of the algorithm processing, and has certain fault tolerance.
Type B avionics devices require each embedded computing module to implement multiple aviation functions. Multiple aviation functions are independent and independent of each other. The hardware requires high integration, high performance, large-capacity memory and solid-state storage, and integrated back. The board bus, system bus, etc., can support fault-tolerant design of the system level and overall level. The internal hardware of the module has certain fault tolerance. The system software can support application software for fault-tolerant design.
The requirements for embedded computer modules in avionics of type C and type D are similar to those of type B. Type E, based on the hardware requirements of Type B, clearly requires that the embedded computer module supports multiple application function partitions to implement functions such as partition scheduling of application functions, health monitoring, and communication management between application function partitions.
In summary, the design requirements for embedded computers in type A are relatively simple, and the design requirements for embedded computers in type E are the most complex and comprehensive. Type E computer design requirements can basically meet the above five types of system design requirements.
Therefore, the design requirements for embedded computers in IMA avionics are summarized as follows:
(1) It is capable of realizing complex aviation functions. When the different functions are running, the conditions are independent and do not affect each other;
(2) Hardware resources require high performance, large storage capacity, and integration of backplane bus, system bus, and external IO interfaces;
(3) Adopting application partitions to manage aviation functions, adopting strict isolation measures between partitions, supporting application partition loading, scheduling, health monitoring, and application inter-partition communication management;
(4) Fault self-detection, diagnosis, and isolation capabilities. Fault-tolerant design of critical circuits.
2 embedded computer platform design
This program uses the PowerPC processor as an example to introduce the design of the embedded computer in the IMA avionics equipment from the aspects of processor selection, software and hardware components.
2.1 Processor Selection
The PowerPC processor is a central processor with a reduced instruction set. It uses a superscalar and superpipelined architecture. It has strong processing capabilities, high performance, and low power consumption. It is currently widely used in aviation airborne equipment. PowerPC processor devices can be roughly divided into main processor series and integrated main processor series according to the features of PowerPC processor chips. The integrated main processor integrates bridge control logic, common peripheral communication interfaces, and bus resources on the basis of the main processor.
The selection of processors depends on the requirements of the equipment and the application environment. The following aspects are mainly considered:
(1) Treatment performance.
The performance of the processor needs to be comprehensively determined according to the functions and performance requirements of the IMA device. The method of determination is basically similar to that of a traditional embedded computer. However, because the embedded computer in the IMA device needs to guarantee system consumption such as additional partition management, the same function is achieved, and the processing performance requirement of the embedded computer in the IMA device is higher than that of the traditional embedded computer. According to the needs of the application environment, the selected embedded processor can integrate some special processing units, such as floating-point processing unit and vector processing unit.
(2) Power consumption.
Unlike traditional devices, IMA devices have complex functions, a large number of modules, a large amount of heat generated by the devices, and a high frequency of internal embedded computer modules. The allowable power consumption is smaller than that of conventional embedded computer modules. Therefore, the processor is selected. In the model, the power consumption of the processor should be taken into consideration based on the heat dissipation means of the IMA device and the assigned power consumption values.
(3) Integration.
The embedded computer in the IMA device requires a high degree of integration. Therefore, the embedded processor in the IMA device preferably uses the integrated host processor.
Based on the above analysis, the design processor selected MPC8640. The processor is an integrated PowerPC host processor with integrated vector processing unit, which has superior processing performance and can meet the application requirements of most IMA avionics equipment. If the actual application requires low processing performance, other types of integrated PowerPC processors can also be used, and the design of the solutions is basically similar.
2.2 Hardware Composition
The hardware of the embedded computer adopts the architecture of a processor plus an FPGA circuit, and the architecture has a good expansibility. The minimum system of the processor mainly realizes the calculation and control resources of the module, is used to run the application software, and focuses on the processing plane. At the same time, the integrated interface resources of the integrated processor can also be used as external interface resources of the module. FPGA has strong design flexibility and can implement various storage, logic processing, and interface resources. It is mainly used to supplement the module's hardware resources and external interface resources, focusing on the data plane. The hardware of the entire embedded computer mainly includes: (1) power supply circuit; (2) clock circuit; (3) processor unit circuit; (4) FPGA unit circuit; (5) external interface circuit; (6) fault processing circuit.
The hardware block diagram of the computer system is shown in Figure 1.
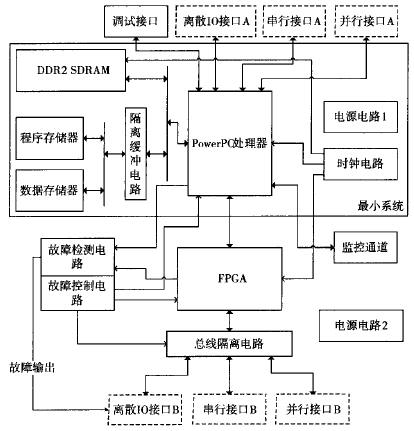
Figure 1 hardware block diagram
The power circuit is used to implement the power control and power conversion of each functional circuit within the module, including the power circuit 1 and the power circuit 2. The power circuit 2 has a simple design, but the basic reliability is high, and is mainly provided for the fault processing circuit and the bus isolation circuit. power input. The clock circuit is used to generate and distribute the clocks needed for the internal circuits and to control the clock output. The processor unit circuit includes the minimum system design of the PowerPC processor. The processing performance and storage resources of the computer are mainly determined by the design of the circuit. The circuit design is closely related to the selected PowerPC processor, and reference can be made to the relevant design data of the processor.
The external interface circuit is mainly used to implement the communication interface between the computer module and other modules or devices, and it needs to be flexibly configured according to the application environment of the computer module, which is indicated by a broken line in FIG. 1 . In this scheme, the external interface circuit is divided into two categories, one is directly implemented by the PowerPC processor, and the module is directly exported through the interface circuit, which is the interface A; the other is implemented by the FPGA, and the module is derived through the isolation circuit and is the interface. B. Interface A cannot be isolated from the outside. The type and number of interfaces implemented are determined directly by the PowerPC processor. This solution uses the MPC8640 processor. The implemented interface A includes a parallel Local bus interface with the bus frequency set to 100 MHz and 32 bits. Data width; one x4 RapidIO interface; one x1 PCI-E interface and four Gigabit Ethernet interfaces. Interface A is mainly used to connect other backplane modules to extend the functions of computer modules. It can also be used as the external interface of a device or system. Interface B leads through the isolation circuit and controls whether it is isolated from the outside. It is often used as the external interface of a device or system. Interface B can implement different interface types according to the requirements of the application environment, including commonly used synchronous serial interfaces, asynchronous serial interfaces, 429 interfaces, and CAN bus interfaces.
The fault processing circuit is used to realize the fault status perception, discrimination, control, and circuit isolation of the computer platform, including a fault detection circuit, a fault control circuit, and a monitoring channel. The fault detection circuit mainly detects the operating states of the processor unit circuit and the FPGA unit circuit, and sends the working status to the fault control circuit and other circuits. The fault control circuit gives control signals for controlling the operating status of the interface isolation circuit, the processor unit, and the FPGA unit. The monitoring channel is used for the exchange of state and parameters between the embedded computer modules as an auxiliary means for the detection and determination of the module faults.
Therefore, using this design scheme, the embedded computer module supports vector processing, has a strong computing capability, can provide a rich external communication interface, has a strong hardware expansion capability and a certain degree of fault tolerance. By tailoring the above hardware resources, the requirements of embedded computer hardware in general IMA avionics can be met.
2.3 Software Composition
Embedded computer system software mainly includes application software and platform system software. Application software is used to implement specific device functions. The platform system software is located between application software and hardware resources. It is mainly used to rationally schedule and manage the resources of the hardware platform to meet the requirements of each application software, and to manage application software for applications. The normal operation of the software provides support and services.
Platform system software usually uses mature commercial operating systems and is directly ported to hardware platforms. IMA avionics equipment usually needs to implement multiple aviation functions. The embedded computer is required to be capable of achieving coordination, management, and control of multiple aviation functions. It is required that each aviation function be reliable, mutually independent, and independent of each other. It is recommended to use application partitions for implementation. Aviation function. Therefore, the selected operating system must be able to support multiple application partitions. Strict isolation must be provided among multiple application partitions. It also supports application partition loading, scheduling, health monitoring, and communication management between application partitions. The multi-tasking operating system selected by traditional embedded computers, such as Wind River's VxWorks operating system, is suitable for relatively simple avionics equipment. The application of avionics equipment for complex functions may increase development difficulty and reduce equipment reliability. A series of questions.
Therefore, in this design scheme, the platform system software selects WindRiver's VxWorks653 operating system. The VxWorks653 operating system is developed from the VxWorks embedded operating system. The interface between the VxWorks 653 and the application software satisfies the requirements of the “Avionics Application Software Standard Interface†(also known as ARINC653 specification) and has been adopted by the Federal Aviation Administration (FAA). DO-178B safety standard certification. Therefore, the software of the entire embedded computer mainly includes: (1) board-level support package; (2) core operating system; (3) partitioned operating system; (4) application program interface; (5) application software partitioning.
The software system block diagram of the computer system is shown in Figure 2.
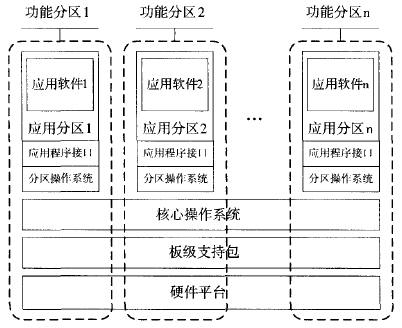
Figure 2 software block diagram
The board support package is located at the bottom of the software and mainly realizes the initialization of the computer hardware and the function of setting up the software operating environment. The management objects of the core operating system are mainly functional partitions, and the security isolation, time-sharing scheduling, and space of each functional partition are realized. State management, communication and health monitoring and other functions; partition operating system running in the user state, the management object is the user application software, to achieve the tasks of the user software scheduling tasks, communication methods and state management functions; application program interface to the system It can be compatible with multiple languages ​​and standard applications, facilitating the porting of applications and system integration. Application partitions provide an independent operating environment for application software, ensuring that the design and operation of application software are completely independent.
As can be seen from Figure 2, the embedded computer system can implement multiple functional partitions. The function of each functional partition is realized by application software, operating system software, and hardware platform resources. The more hardware resources available, the functional partition can be achieved. The more often, each functional partition implements a sub-function of the device.
Therefore, by porting and running the VxWorks 653 operating system on a computer hardware platform, the computer system is virtualized into a plurality of mutually independent embedded computer platforms. Each virtual computer platform realizes one device subfunction, and the failure cannot be among device subfunctions. Communication, to improve the reliability and operational efficiency of IMA's avionics aviation function, can meet the application requirements of IMA avionics equipment.
3 Conclusion
This paper studies the ARINC651 report and summarizes the technical requirements of the embedded computer in the IMA avionics equipment. It proposes a design scheme of an embedded computer platform that can meet the design requirements and provides reference for the engineering application design of the embedded computer in the IMA avionics equipment. .
Currently, this technical solution has been adopted in the design of an integrated control management device and an embedded computer of an IMA radio device. Through the joint test and testing of the equipment functions, it shows that the embedded computer has a high degree of hardware integration, can provide a more adequate computing capacity, and achieve more complex system functions; the software implementation of the application partition can reduce the complexity of the software design of complex systems Improve the debugging work efficiency; At the same time, it has certain fault tolerance ability, can support higher-level fault-tolerant design of equipment, and can meet the application requirements of general IMA avionics equipment.
The main problem in the application is that as the type and number of interface B implemented by FPGA integration increase, the power consumption of the FPGA is also rising further. Therefore, in the actual design process, in order to control the power consumption of the module and prevent excessive stress on the thermal design of the device, it is necessary to comprehensively weigh the integration degree of interface B and the performance of the processor.
Our company is specialized in supplying different brand of high quality Solenoid Valve. A solenoid valve is an electromechanically operated valve.Solenoid valves are the most frequently used control elements in fluidics. Their tasks are to shut off, release, dose, distribute or mix fluids. They are found in many application areas. Solenoids offer fast and safe switching, high reliability, long service life, good medium compatibility of the materials used, low control power and compact design.We could also supply solenoid separately. Our parts have been exported to over 50 countries all over the world.
Solenoid Valve
Solenoid Valve,Low Pressure Switch,Automatic Pressure Control,Solenoid Valve For Refrigeration System
ZHEJIANG ICE LOONG ENVIRONMENTAL SCI-TECH CO.,LTD. , https://www.china-refrigerantgas.com