For humanoid robots, visual function is extremely important. Among the various key technologies of soccer robots, machine vision is one of the most widely used and basic technologies. The research of mobile robot vision mainly focuses on color model establishment, target recognition, positioning and tracking. The recognition and localization algorithm of the humanoid robot vision system is also the current research hotspot. The real-time recognition and location of the target is the premise of the soccer robot playing accurately in the football match. The article mainly aims to improve the color model and the target positioning algorithm for the existing problems of the soccer robot in the visual system. The target tracking algorithm is added to ensure the accuracy of target recognition and positioning. Tested and debugged on the iKid soccer robot, the test results have good real-time and accuracy.
introduction
In the RoboCup humanoid robot competition, vision is the main way to obtain external information. The robot collects image information of the surrounding environment through the camera, and then recognizes the environment and recognizes the target. In the robot soccer game, the information in the stadium includes blue and yellow goals, corners, and orange balls. The soccer robot needs to identify and judge the information it acquires and make corresponding decisions. The accuracy and real-time nature of soccer robot recognition is critical to the outcome of the game. The research of this innovative project is mainly based on the vision system of iKid robot.
According to the experience of site debugging, the following problems exist in the robot vision model and the location tracking algorithm: 1) When there is a slight change in the surrounding environment or an object in the environment that is close to the color of the target object, it has a great influence on the target recognition calibration result; 2) The conversion from RGB to HSV affects the real-time performance of the system; 3) The current positioning of the soccer robot is to use the transformation between coordinates and the algorithm of triangle imaging. In the debugging, it is found that this positioning algorithm has great problems in accuracy; When the robot is far away from the target object, the target is not accurately positioned and the positioning error is large.
In view of the above problems, in this project, this paper proposes to improve the visual model and target positioning algorithm of the original robot, and add tracking algorithm to make the iKid robot vision system more accurate and efficient.
1 Robot system structure
The platform for this project research is the iKid humanoid robot. The iKid robot has a total of 20 degrees of freedom. The head has two degrees of freedom of tilting and swinging, 6 degrees of freedom in the leg, and 3 degrees of freedom in the arm. The head is a USB webcam Logitech C905, the core board model is Cortex-A8, and the selected servos are RX28 and RX64 from Korea Robots.
In terms of intelligent decision system hardware, the iKid robot uses the Cortex-A8 core board and its main processor is the Samsung S5PV210. In addition, the S5PV210 integrates a high-performance graphics engine, and also includes image hard decoding function, which can smoothly run Android, Linux and other operating systems.
The image capture device of iKid humanoid robot is selected by USB2.0 webcam Logitech C905, which can transmit compressed image with resolution of 640 & TImes; 480 at 30 frames per second. The frequency of camera acquisition can reach the frequency of human eyes. And can see the target at any position of the venue at the coordinate position of the current playing field. The camera also has automatic adjustment functions such as variable white balance and variable gain, which enables the robot to maintain good image quality under different lighting conditions. The camera supports images in RGB and YUYV formats and supports multiple resolutions.
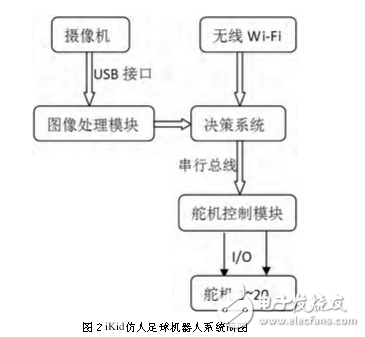
In the decision-making of iKid robot, a distributed system separated from the motion control system and the intelligent decision system is adopted. After the information transmitted by Wi-Fi and the image information collected by the camera are processed, the robot makes corresponding decisions and controls the steering gear. The corresponding movement is made so that the robot can make corresponding movements.
The specific system diagram is shown in Figure 2.
Figure 2 iKid humanoid robot system diagram (see right column) Overall, the hardware platform of iKid soccer robot consists of its vision system, decision system and motion control system.
2 Improvement of color model
2.1 Selection of color model
There are many ways to process color images. The most common ones are RGB model, HSV model and YUV model. The RGB model is greatly affected by the light, and in the game, a slight movement of the playing field may be affected, and then need to be recalibrated. In the YUV model, the Y term represents the light intensity, that is, the brightness (Luminance), and the U and V represent the Chrominance. Where the brightness signal Y
The information of the chrominance signals U and V are independent of each other, and the correlation is small, and at the same time, the resolution of the color component is not significantly affected by the image quality.
The YUV color model is obtained by linear transformation from the RGB model. The conversion formula is as follows:
Where N is the image resolution, B is the number of bits, and r is the frame rate. In order to ensure that the soccer robot can perform image acquisition and processing faster on the field, the collected images are converted into YUYV format images by the hard decoding function of the image processor in a RGB compression format through multiple experiments. Each image can be formatted in 8ms. The YUYV color model is a sampling format, which is YUV4:2:2, which retains Y pixels, and the UV samples every two pixels in horizontal space.
Secondly, a pixel table is established, and the pixel table represents the relationship between the YUV of an image and the data in the color table. The original YUV is three sets of 8-bit data. By compiling the three sets of data side by side to establish the index of the table, each set of data can be indexed, that is, the value of the pixel points Y, U, and V at a certain place is performed in the table. The index yields the color number of the corresponding pixel. In order to reduce the impact of illumination, the soccer robot first performs field image acquisition, and then counts the values ​​of Y, U, and V of the captured pixels, and then selects a threshold.
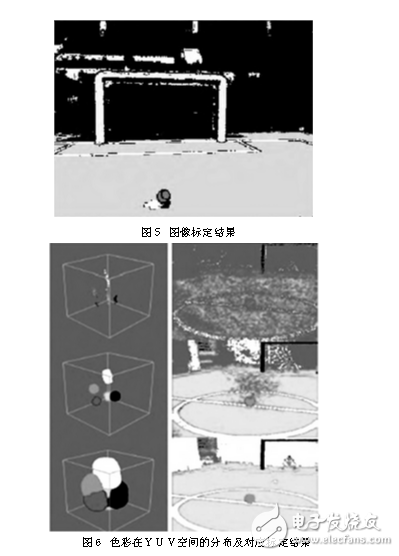
In the process of color calibration of the robot and the establishment of the color model, the analysis data found that the change of the ambient illumination degree has little influence on the distribution of U and V values. It can be considered that the U and V values ​​do not change with the change of the illumination conditions, and the color correction The table generally does not need to be regenerated, and it still needs to be recalibrated only when the light changes greatly.
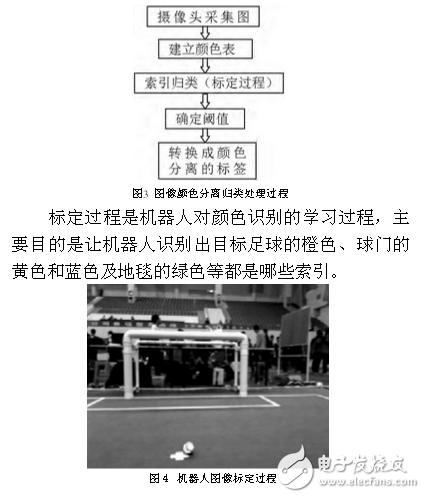
The following figure shows the process of image color separation and classification process collected by the camera:
In the process of robot recognition, the edge detection method is also added, mainly by judging whether the target ball is circular and judging whether the length and height of the goal meet a certain ratio, and also limiting the ability of the robot to recognize the football in a distant position, and finally Identify and identify the target object to ensure the accuracy of the identification.
Small Gear Motor,Customized Dc Motor,Customized Dc Gear Motor,Dc Permanent Magnet Motor
NingBo BeiLun HengFeng Electromotor Manufacture Co.,Ltd. , https://www.hengfengmotor.com